अच्छे अंडरसीट वाहन छोटे पैकेज में आते हैं
-109905 "Riptide AUV (क्रेडिट बीएई सिस्टम)")
Riptide AUV (क्रेडिट बीएई सिस्टम)
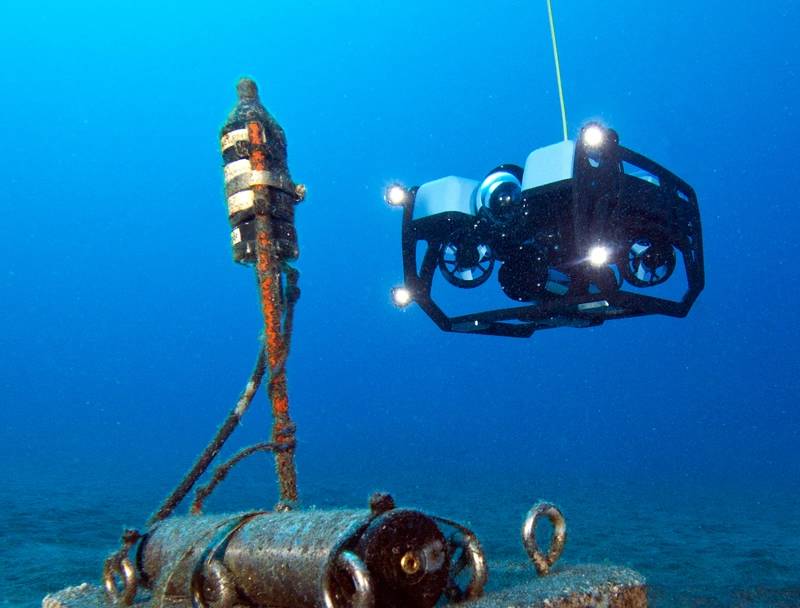
-109906 "एक त्रिशूल ROV (क्रेडिट SOFAR महासागर)")
एक त्रिशूल ROV (क्रेडिट SOFAR महासागर)
-109907 "एक रीफ़ पर रेंजरबोट (क्रेडिट मैथ्यू डनबिन / QUT)")
एक रीफ़ पर रेंजरबोट (क्रेडिट मैथ्यू डनबिन / QUT)
छुट्टियों का मौसम अभी-अभी बीता है, और बहुतों ने मुहावरा सुना होगा, "अच्छी चीजें छोटे पैकेज में मिलती हैं।" क्या यह आज के अंडरसीट वाहनों के लिए सही है? वास्तव में यह करता है। क्षेत्र में हालिया हड़ताली रुझानों में से एक कॉम्पैक्ट और सस्ती का प्रसार है, फिर भी अत्यधिक प्रभावी, अंडरसीट वाहन हैं। पिछले एक दशक में नए दूर से संचालित वाहन (आरओवी) और स्वायत्त पानी के नीचे के वाहनों (एयूवी) का उत्पादन किया गया है जो आसानी से एक व्यक्ति द्वारा ले जाया और तैनात किया जाता है। उपभोक्ता इलेक्ट्रॉनिक्स क्षेत्र से प्रेरित सर्किटरी, सेंसर, और बैटरियों के विकास को भुनाने में, ये छोटे वाहन व्यावहारिक अनुप्रयोगों में अपने वजन वर्ग से ऊपर जाते हैं।
आरओवी और एयूवी दोनों के कई उदाहरण हैं जिन पर विचार किया जा सकता है, लेकिन चार का चयन श्रेणी के उदाहरण के रूप में समीक्षा के लायक है। वे कुछ प्रमुख तकनीकी और परिचालन विकल्पों पर विपरीत दृष्टिकोण भी पेश करते हैं। ROVs के लिए सोफ़र ओशन ट्राइडेंट संभवतः कॉम्पैक्ट प्रदर्शन और डिजाइन अनुकूलन का प्रतिनिधित्व करता है। जबकि ब्लू रोबोटिक्स को उपयुक्त रूप से BlueROV नाम दिया गया है, और अधिक लचीला विकल्प प्रस्तुत करता है। AUVs में BAE Systems Riptide माइक्रो व्हीकल द्वारा उच्च स्तरीय "क्लासिक" एप्रोच का प्रदर्शन किया जाता है, यद्यपि यह बहुत ही लचीले आउटलुक दृष्टिकोण के साथ होता है। क्वींसलैंड प्रौद्योगिकी विश्वविद्यालय, रेंजरबॉट का एक नया प्रवेशी, विशिष्ट मामलों के लिए लागतों को कम रखने के लिए एक उपन्यास प्रतिमान प्रस्तुत करता है।
ROV के साथ शुरू, ब्लू रोबोटिक्स से BlueROV एक ठेठ ROV फॉर्म फैक्टर प्रस्तुत करता है। आरओवी एक बड़े काम या अनुसंधान के रूप में डिज़ाइन किया गया होगा, वाहन में एक खुला फ्रेम होता है जो इलेक्ट्रॉनिक्स और बैटरी के बाड़ों, थ्रस्टर्स, बोयेंसी फोम, और गिट्टी भार को ले जाता है। यह सरल डिजाइन मजबूत, विस्तार योग्य और क्षेत्र के लिए पूरी तरह से परिचित है। प्रणाली छह- और आठ-थ्रेशर कॉन्फ़िगरेशन, कई वैकल्पिक सामान, और महत्वपूर्ण प्रदर्शन और लचीलापन प्रदान करती है। लेकिन लागत में कमी और जटिलता के प्रबंधन के लिए उपन्यास का दृष्टिकोण इसे गेम चेंजर बनाता है।
ब्लूआरवी को लागत कम रखने के लिए आंशिक रूप से असेंबल किया जाता है, जिसके लिए अनुमानित छह से बारह घंटे उपयोगकर्ता विधानसभा को पूरा करने की आवश्यकता होती है। जबकि यह खरीदार के लिए लागत बचत है, यह ग्राहकों को घटकों और सिस्टम आर्किटेक्चर को समझने का मौका भी प्रदान करता है। यह अंतिम उपयोगकर्ता संशोधनों और उन्नयन के लिए एक उपकरण का समर्थन करता है। वाहन आम ड्रोन प्रौद्योगिकियों का लाभ उठाता है और ओपन-सोर्स अरडूबस कंट्रोल फर्मवेयर को नियोजित करता है, यह उपयोगी सुविधाएँ और एक व्यापक उपयोगकर्ता समुदाय दोनों प्रदान करता है। ऑपरेटर लैपटॉप कंप्यूटर और गेम कंट्रोलर के साथ ROV को नियंत्रित करता है। ओपन-सोर्स QGroundControl एप्लिकेशन यूजर इंटरफेस प्रदान करता है। प्रौद्योगिकी के इस शक्तिशाली संयोजन को $ 3,500 की उल्लेखनीय रूप से कम प्रवेश कीमत पर पेश किया जाता है। यह एक महत्वपूर्ण नए दर्शकों के लिए वास्तव में सक्षम ROV लाता है।
 एक ब्लूआरओवी (क्रेडिट ब्लू रोबोटिक्स, जेफ मिलिसन) भी आरओवी के लिए दर्शकों का विस्तार सोफ़र ओशन, पूर्व में ओपनरोव से त्रिशूल है। यह कॉम्पैक्ट ROV इंजीनियरिंग अनुकूलन में एक केस स्टडी है। इसका रूप कारक और वास्तुकला अन्य बैटरी चालित ROVs से एक महत्वपूर्ण विकास है। ट्राइडेंट का एक अनूठा डिज़ाइन है जो एक आरओवी (दूर से संचालित वाहन) की बहुमुखी प्रतिभा और नियंत्रण को जोड़ती है और एक एयूवी (ऑटोनॉमस अंडरवाटर व्हीकल) की दक्षता है। यह तंग स्थानों में विस्तारित रैखिक पारगमन और जटिल युद्धाभ्यास कर सकता है। एक अद्वितीय ऑफ़सेट कॉन्फ़िगरेशन में केवल तीन थ्रस्टर्स का उपयोग करते हुए, ROV कुशलतापूर्वक आगे बढ़ सकता है, लेकिन बहुत ही कुशलता से पैंतरेबाज़ी करता है। ROV का ऑफ-सेंटर वर्टिकल थ्रस्टर इसे उच्च गति पर पिच करने का कारण बन सकता है, लेकिन कम गति से संचालन करते समय पिचिंग के बिना भी होवर या गहराई को बदल सकता है - जिस तरह से एक पारंपरिक ROV काम करता है। एक सुंदर हाइड्रोडायनामिक डिज़ाइन के अलावा ट्राइडेंट डिजाइन किया गया था। अत्यधिक पोर्टेबल और काफी टिकाऊ होना। आरओवी एक बैकपैक में फिट होने के लिए काफी छोटा है जबकि इसके साइड पैनल को रबर कोटिंग के साथ ढाला जाता है जिससे इसे बंपर का रूप दिया जाता है। उपयोगकर्ता इंटरफ़ेस एचटीएमएल 5 और वेबजीएल जैसे इंटरनेट मानकों पर आधारित है, बस लैपटॉप, टैबलेट और मोबाइल उपकरणों पर चलने वाले ब्राउज़र के माध्यम से पायलटिंग को सक्षम करने के लिए। आधुनिक सॉफ्टवेयर ओपन सोर्स एप्रोच का आलिंगन यह सुनिश्चित करता है कि कोड आधार को समुदाय और कंपनी दोनों द्वारा लगातार अपडेट किया जा सकता है। यह उपयोगकर्ता संचालित सॉफ़्टवेयर परिवर्तनों जैसे कि नए उपयोगकर्ता इंटरफेस को ऑपरेटिंग अनुभव और वैश्विक ट्राइडेंट समुदाय के लिए बेहतर आरओवी क्षमताओं के वितरण को आकार देने की अनुमति देता है।
एक ब्लूआरओवी (क्रेडिट ब्लू रोबोटिक्स, जेफ मिलिसन) भी आरओवी के लिए दर्शकों का विस्तार सोफ़र ओशन, पूर्व में ओपनरोव से त्रिशूल है। यह कॉम्पैक्ट ROV इंजीनियरिंग अनुकूलन में एक केस स्टडी है। इसका रूप कारक और वास्तुकला अन्य बैटरी चालित ROVs से एक महत्वपूर्ण विकास है। ट्राइडेंट का एक अनूठा डिज़ाइन है जो एक आरओवी (दूर से संचालित वाहन) की बहुमुखी प्रतिभा और नियंत्रण को जोड़ती है और एक एयूवी (ऑटोनॉमस अंडरवाटर व्हीकल) की दक्षता है। यह तंग स्थानों में विस्तारित रैखिक पारगमन और जटिल युद्धाभ्यास कर सकता है। एक अद्वितीय ऑफ़सेट कॉन्फ़िगरेशन में केवल तीन थ्रस्टर्स का उपयोग करते हुए, ROV कुशलतापूर्वक आगे बढ़ सकता है, लेकिन बहुत ही कुशलता से पैंतरेबाज़ी करता है। ROV का ऑफ-सेंटर वर्टिकल थ्रस्टर इसे उच्च गति पर पिच करने का कारण बन सकता है, लेकिन कम गति से संचालन करते समय पिचिंग के बिना भी होवर या गहराई को बदल सकता है - जिस तरह से एक पारंपरिक ROV काम करता है। एक सुंदर हाइड्रोडायनामिक डिज़ाइन के अलावा ट्राइडेंट डिजाइन किया गया था। अत्यधिक पोर्टेबल और काफी टिकाऊ होना। आरओवी एक बैकपैक में फिट होने के लिए काफी छोटा है जबकि इसके साइड पैनल को रबर कोटिंग के साथ ढाला जाता है जिससे इसे बंपर का रूप दिया जाता है। उपयोगकर्ता इंटरफ़ेस एचटीएमएल 5 और वेबजीएल जैसे इंटरनेट मानकों पर आधारित है, बस लैपटॉप, टैबलेट और मोबाइल उपकरणों पर चलने वाले ब्राउज़र के माध्यम से पायलटिंग को सक्षम करने के लिए। आधुनिक सॉफ्टवेयर ओपन सोर्स एप्रोच का आलिंगन यह सुनिश्चित करता है कि कोड आधार को समुदाय और कंपनी दोनों द्वारा लगातार अपडेट किया जा सकता है। यह उपयोगकर्ता संचालित सॉफ़्टवेयर परिवर्तनों जैसे कि नए उपयोगकर्ता इंटरफेस को ऑपरेटिंग अनुभव और वैश्विक ट्राइडेंट समुदाय के लिए बेहतर आरओवी क्षमताओं के वितरण को आकार देने की अनुमति देता है।
यह प्रयोग करने में आसान है, उच्च प्रदर्शन पैकेज $ 1,700 में अमेज़न पर उपलब्ध है। यह वास्तव में सुलभ, और उपयोगी, महासागर रोबोटों के लिए एक नया युग है। एक टेथर्ड अनुभव की तलाश करने वाले लोग अत्यधिक अनुकूलित सिस्टम या अधिक एंड-यूज़र कॉन्फ़िगरेशन के साथ एक मॉड्यूलर दृष्टिकोण का चयन कर सकते हैं। या तो मामले में, एक आधुनिक लैपटॉप या पीसी की लागत के लिए 100 मीटर तक पानी की गहराई में सार्थक मिशन संलग्न करने के लिए पूरी तरह से सुसज्जित किया जा सकता है। "कॉर्ड को काटने" के इच्छुक लोगों के पास अतिरिक्त विकल्प हैं।
हाल के वर्षों में प्रभावी एयूवी छोटे, और अधिक किफायती हो गए हैं। उनके आरओवी चचेरे भाई के साथ विचार करने के लिए कई उदाहरण हैं। आधुनिक "माइक्रो" एयूवी शायद बीएई सिस्टम्स के उत्पादों से जुड़ा हुआ है, जो पूर्व में रिप्टाइड ऑटोनोमस सॉल्यूशंस है। Riptide छोटे वाहनों और तेजी से विकास की कहानी है। 2015 में स्थापित Riptide ने जल्दी से एक कॉम्पैक्ट AUV की पेशकश की।
Riptide का पहला उत्पाद माइक्रो-यूयूवी था, जो एक अत्यधिक लचीला, खुला स्रोत स्वायत्त अंडरसीयर वाहन था, जो स्वायत्तता और व्यवहार, उप-सेंसर और अन्य नए पेलोड के डेवलपर्स के लिए एक अत्याधुनिक, कम लागत वाला समाधान प्रदान करता था। माइक्रो-यूयूवी में खुले हार्डवेयर और सॉफ्टवेयर इंटरफेस थे, जो उपयोगकर्ताओं को प्रौद्योगिकी विकास को आगे बढ़ाने के लिए एक विश्वसनीय और मजबूत मंच प्रदान करते थे। अपने वर्ग में सबसे अच्छा हाइड्रोडायनामिक हस्ताक्षर के साथ वाहन की डिजाइन को उच्च दक्षता के लिए अनुकूलित किया गया था। आधार माइक्रो-यूयूवी 4 7/8 इंच व्यास, लंबाई 40 इंच और वजन 22 पाउंड है। मानक प्रणाली 300 मीटर की गहराई तक रेटेड है।
हालांकि यह वाहन एक "विशिष्ट" उद्योग की तरह लग सकता है, लेकिन यह अपने छोटे आकार से अधिक से विभेदित है। एंड-यूजर जरूरतों पर ध्यान सॉफ्टवेयर डिजाइन में सबसे अधिक प्रचलित था। विशिष्ट मालिकाना आर्किटेक्चर के विपरीत, माइक्रो-यूयूवी ने एक लचीली वास्तुकला का निर्माण किया, जिसमें बड़ी मात्रा में ओपन सोर्स सॉफ़्टवेयर का उपयोग किया गया। माइक्रो-यूयूवी सॉफ्टवेयर की प्रारंभिक रिलीज में, रिप्टाइड ने Arduino और बीगलबोन ब्लैक डेवलपमेंट प्लेटफार्मों के लिए कोड की पेशकश की, साथ ही साथ MOOS-IvP रोबोट नियंत्रण इंजन के लिए समर्थन किया। यह किसी भी AUV के लिए एक शक्तिशाली फीचर सेट था। $ 15,000 के शुरुआती मूल्य पर बाजार में महत्वपूर्ण ब्याज था।
2019 तक इस उत्पाद की सफलता बीएई सिस्टम्स द्वारा नोट की गई थी। BAE Systems FAST Labs संगठन ने Riptide का अधिग्रहण किया और अब वह प्लेटफॉर्म प्रौद्योगिकी और स्केलिंग विनिर्माण को परिपक्व कर रहा है। फास्ट लैब्स बीएई सिस्टम्स, इंक का आर एंड डी आर्म है और इसमें अद्वितीय है
एक इन-हाउस, ग्राहक-वित्त पोषित अनुसंधान एवं विकास व्यवसाय के रूप में रक्षा उद्योग
उन्नत प्रौद्योगिकियों को विकसित करने और संक्रमण करने के लिए कंपनी के वैश्विक उद्यम में सहयोग करें। Riptide द्वारा शुरू किया गया माइक्रो AUV इस प्रक्रिया से लाभान्वित हो रहा है।
एक और छोटा AUV जो हाल ही में आया है वह है RangerBot। यह वाहन अंतिम उपयोगकर्ताओं के लिए एक किफायती समाधान प्रदान करने के लिए एक अलग दृष्टिकोण लेता है। रेंजरबोट को ऑस्ट्रेलिया के ब्रिसबेन में क्वींसलैंड यूनिवर्सिटी ऑफ टेक्नोलॉजी (QUT) के इंजीनियरों द्वारा डिजाइन किया गया था। QUT में टीम मशीन विजन पर केंद्रित रोबोटिक्स सेंटर में काम करती है। वे ग्रेट बैरियर रीफ पर पर्यावरणीय आकलन का समर्थन करने के लिए भी काम करते हैं। एक प्रमुख प्रतिमान पारी को तब सक्षम किया गया जब टीम ने यह पहचानते हुए कि उनके लक्षित वातावरण में पानी की स्थिति बहुत स्पष्ट थी, विशेष रूप से दृष्टि-आधारित संवेदन को नियोजित करने के लिए चुना।
 रेंजरबोट ऑन ए रीफ (क्रेडिट मैथ्यू डनबिन / क्यूयूट) यह शायद स्पष्ट लगता है, लेकिन आकार, शक्ति और परित्याग को छोड़ दें, तो विशेष रूप से, ध्वनिक उपकरणों की लागत दंड, रेंजरबॉट छोटे, उपयोग करने में आसान, और विशिष्ट विकल्पों के लिए अधिक सस्ती हो गए। कैमरों की एक श्रृंखला का उपयोग करते हुए, रेंजरबॉट अपने क्षैतिज पाठ्यक्रम को तल पर और साथ ही इसकी गहराई का प्रबंधन कर सकता है। नवीनतम फोटो मोज़ेक टूल का उपयोग करके, वाहन एक सर्वेक्षण साइट पर उपयोगी डेटा उत्पाद भी बना सकता है। दृश्य प्रणालियां जटिल पर्यावरण प्रबंधन अनुप्रयोगों के लिए भी अनुमति देती हैं। रैंगरबॉट और इसके पूर्ववर्ती प्रोटोटाइप, कांटों के स्टारफिश (सीओटीएस) के मुकुट की पहचान करने में सक्षम साबित हुए हैं, एक शिकारी जो प्रवाल भित्तियों को तबाह कर सकता है। AUVs ने एक पेलोड ले जाने की क्षमता का भी प्रदर्शन किया है जो COTS को एक समाधान के सटीक इंजेक्शन के माध्यम से समाप्त कर सकता है जो केवल आक्रामक जीव को परेशान करता है। पेलोड इंटरफ़ेस जो इस मिशन का समर्थन करता है, रीफ बहाली के साथ भी मदद कर रहा है। रेंजरबोट पर 8 लीटर तक मूंगा लार्वा का एक मूत्राशय स्थापित किया जा सकता है। अपनी स्वचालित दृष्टि क्षमताओं का उपयोग करके, AUV एक अपमानित चट्टान पर उचित नंगे स्थानों की पहचान कर सकता है और लार्वा की उपयुक्त एकाग्रता को जमा कर सकता है। इस प्रकार, एक पूरी तरह से भरा हुआ रेंजरबॉट लगभग 250 वर्ग मीटर की चट्टान को बीज सकता है। यह पिछली गोताखोर-आधारित तकनीकों की तुलना में अधिक कुशल है।
रेंजरबोट ऑन ए रीफ (क्रेडिट मैथ्यू डनबिन / क्यूयूट) यह शायद स्पष्ट लगता है, लेकिन आकार, शक्ति और परित्याग को छोड़ दें, तो विशेष रूप से, ध्वनिक उपकरणों की लागत दंड, रेंजरबॉट छोटे, उपयोग करने में आसान, और विशिष्ट विकल्पों के लिए अधिक सस्ती हो गए। कैमरों की एक श्रृंखला का उपयोग करते हुए, रेंजरबॉट अपने क्षैतिज पाठ्यक्रम को तल पर और साथ ही इसकी गहराई का प्रबंधन कर सकता है। नवीनतम फोटो मोज़ेक टूल का उपयोग करके, वाहन एक सर्वेक्षण साइट पर उपयोगी डेटा उत्पाद भी बना सकता है। दृश्य प्रणालियां जटिल पर्यावरण प्रबंधन अनुप्रयोगों के लिए भी अनुमति देती हैं। रैंगरबॉट और इसके पूर्ववर्ती प्रोटोटाइप, कांटों के स्टारफिश (सीओटीएस) के मुकुट की पहचान करने में सक्षम साबित हुए हैं, एक शिकारी जो प्रवाल भित्तियों को तबाह कर सकता है। AUVs ने एक पेलोड ले जाने की क्षमता का भी प्रदर्शन किया है जो COTS को एक समाधान के सटीक इंजेक्शन के माध्यम से समाप्त कर सकता है जो केवल आक्रामक जीव को परेशान करता है। पेलोड इंटरफ़ेस जो इस मिशन का समर्थन करता है, रीफ बहाली के साथ भी मदद कर रहा है। रेंजरबोट पर 8 लीटर तक मूंगा लार्वा का एक मूत्राशय स्थापित किया जा सकता है। अपनी स्वचालित दृष्टि क्षमताओं का उपयोग करके, AUV एक अपमानित चट्टान पर उचित नंगे स्थानों की पहचान कर सकता है और लार्वा की उपयुक्त एकाग्रता को जमा कर सकता है। इस प्रकार, एक पूरी तरह से भरा हुआ रेंजरबॉट लगभग 250 वर्ग मीटर की चट्टान को बीज सकता है। यह पिछली गोताखोर-आधारित तकनीकों की तुलना में अधिक कुशल है।
इन सफल अनुसंधान प्रयासों से प्रेरित होकर QUT में टीम ने उत्पादन के लिए रेंजरबॉट डिजाइन को अनुकूलित किया है और एक व्यावसायीकरण प्रयास का समर्थन करने की तैयारी कर रही है। जब यह उत्पाद संस्करण बाजार में आता है, तो यह आरयूवी मुक्त-तैराकी दक्षता के संयोजन के साथ आरओवी स्तर की गतिशीलता के साथ-साथ उन्नत सर्वेक्षण और निरीक्षण क्षमताओं के साथ एक शक्तिशाली समाधान पेश करेगा। यहाँ पर चेतावनी यह है कि दृश्य तकनीक के काम करने के लिए पानी की स्पष्टता पर्याप्त रूप से अधिक होनी चाहिए। लेकिन वैश्विक महासागर में कई ऐसे ऑपरेटिंग वातावरण हैं।
यहां प्रस्तुत उदाहरणों को इस कथन को मान्य करने की पेशकश की जाती है कि "अच्छे अंडरसीट वाहन छोटे पैकेज में आते हैं।" ROV और AUV उपयोगकर्ता कई विकल्पों को पा सकते हैं, जिनमें यहां चर्चा की गई प्रणालियों से परे भी शामिल हैं। इन विकासों में निहित रुझानों में खुले स्रोत सॉफ्टवेयर, आधुनिक उत्पादन उपकरण और अन्य क्षेत्रों से लागत लाभ, विशेष रूप से उपभोक्ता इलेक्ट्रॉनिक्स को अधिक से अधिक अपनाना शामिल है। अभिनव सोच और स्वच्छ शीट डिजाइन का प्रभाव भी उल्लेखनीय है। यहां वाहन, और क्षेत्र में कई अन्य कॉम्पैक्ट प्रसाद, व्यक्तियों, या संगठनों की सोच से लाभ उठाते हैं, जो इस क्षेत्र के लिए नए हैं। पुरानी तकनीकों, या डिज़ाइन अवधारणाओं से मुक्त होकर, छोटे अंडरसीट वाहन समुदाय को सक्षम करने वाला एक बड़ा विचार प्रतीत होता है।
ब्लूएनर्जीज और टोटलएनर्जीज ने लाइबेरिया के अपतटीय क्षेत्रों में अन्वेषण को गति दी।

हगिन बी प्लेटफार्म का ऊपरी भाग उत्तरी सागर विकास की ओर अग्रसर है।
-171989 "(क्रेडिट: एकर बीपी)")
वैटनफॉल ने जर्मनी के सबसे बड़े अपतटीय पवन ऊर्जा संयंत्र पर पहला मोनोपाइल स्थापित किया।
-171929 "नॉर्डलिच मोनोपाइल इंस्टालेशन (क्रेडिट: DEME)")
पेमेक्स के पूर्व प्रमुख पर दुर्व्यवहार के आरोप में जांच चल रही है; मेक्सिको के राष्ट्रपति शीनबाम ने कोई सुरक्षा प्रदान नहीं की है।
")
वार्ड ने टोयो कंस्ट्रक्शन को हाइब्रिड केबल लेयर की आपूर्ति की
-171805 "(क्रेडिट: वर्द)")
इक्विनोर ने जापान की अपतटीय पवन ऊर्जा परियोजना को रद्द किया

तैरता हुआ परमाणु ऊर्जा संयंत्र: अपतटीय ऊर्जा का एक नया क्षेत्र

मर्फी ने पश्चिमी अफ्रीका के तट से दूर तेल की खोज की

माको अपतटीय क्षेत्र ने पीटी पीएएल के साथ अनुबंध प्राप्त करके पहले गैस उत्पादन की दिशा में एक कदम बढ़ाया

-171635 "(क्रेडिट: कॉनरैड)")
वेलेउरा ने नोंग याओ में ड्रिलिंग कार्य पूरा किया, थाईलैंड की खाड़ी में उत्पादन में वृद्धि हुई

PRIO ने चौथा वाहू कुआँ चालू किया, उत्पादकों के लिए नियोजित रोलआउट पूरा किया
-171544 "(क्रेडिट: PRIO)")
ड्रिलिंग अभियान में प्रगति के साथ ही वैल्को ने गैबॉन के तट पर स्थित अपने कुएं से अच्छे परिणाम प्राप्त किए हैं।
-171461 "(क्रेडिट: वालको एनर्जी)")