भविष्य का इमेजिंग
")
एक बार, सबसिआ इंफ्रास्ट्रक्चर के दृश्य निरीक्षण का मतलब था कि गोताखोर अभी भी कैमरों को सीफ्लोर पर ले जा रहे हैं, यह उम्मीद करते हैं कि कैमरा आवरण बाढ़ नहीं आएगा, या यह कि फिल्म विकास के दौरान उजागर या नष्ट नहीं होगी। यहां तक कि लाइव वीडियो फीड के साथ पहले रिमोट से संचालित वाहनों (आरओवी) का उपयोग करते हुए, किसी भी स्तर का करंट लगने पर सीमित नियंत्रण और स्थिति की कार्यक्षमता के कारण निरीक्षण लक्ष्य की लंबी पर्याप्त दृष्टि को पकड़ना मुश्किल था।
यह कहना सुरक्षित है, उद्योग ने एक लंबा सफर तय किया है और इमेजिंग संभावनाएं दिन-प्रतिदिन बढ़ रही हैं। वास्तव में, यह समस्या अब बनने लगी है कि एकत्रित किए जा रहे डेटा की "सुनामी" को कैसे संसाधित किया जाए।
ये मुद्दे अक्टूबर में एबरडीन में द हाइड्रोग्राफिक सोसायटी द्वारा स्कॉटलैंड (THSiS), इंटरनेशनल मरीन कॉन्ट्रैक्टर्स एसोसिएशन (IMCA) और सोसाइटी ऑफ अंडरवाटर टेक्नोलॉजी (SUT) में आयोजित एक संयुक्त सेमिनार में शीर्ष पर थे।
एक ओर, सेंसर प्लेटफ़ॉर्म विकसित हो रहे हैं। ROV और स्वायत्त दोनों अंडरवाटर वाहन (AUV) उपयोग करने के लिए तेज़ होते जा रहे हैं; बीपी का लक्ष्य है कि 2025 तक समुद्री स्वायत्त प्रणालियों (एमएएस) के माध्यम से 100% उप-निरीक्षण का निरीक्षण किया जाए, पीटर कोलिन्सन, वरिष्ठ उप-अधिकारी और बीपी के तेल में पर्यावरण विशेषज्ञ, सेमिनार में बताया।
वे अधिक स्वायत्त भी बन रहे हैं, जो ऑनशोर संचालन केंद्रों द्वारा समर्थित हैं। इक्विनोर ने पहले से ही ऑनशोरिंग सेंटरों (ओशनियर और आईकेएम के माध्यम से) से आरओवी संचालन का परीक्षण किया है और इस साल यह टिलर पर ardsgard फील्ड हेलिकॉप्टर नॉर्वे में एक सबसैयार गैराज में ईल्यूम के सांप जैसे उप-रोबोट का परीक्षण करने के लिए निर्धारित है। सेमिनार को बताया, 2020 तक, यह उम्मीद है कि सेल्सगर्ल मैरीटाइम रोबोटिक्स के निदेशक रिचर्ड मिल्स, टीथरलेस जा सकते हैं। अगला कदम मानवरहित सतह के जहाजों के संयोजन में उपयोग किया जा सकता है।
इस बीच, इमेजिंग तकनीक, लेजर से लेकर फोटोग्राममेट्री, इन प्लेटफार्मों को अधिक डेटा इकट्ठा करने में मदद कर रही है, तेजी से और, संभवतः, उन्हें नेविगेट करने में भी मदद करती है।
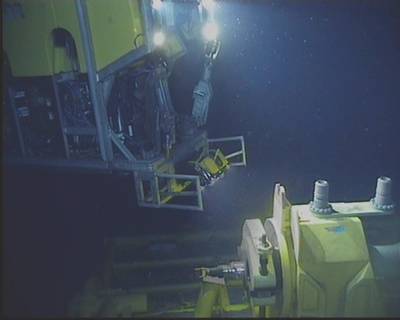 एक ORUS3D प्रणाली का उपयोग करके Subsea सर्वेक्षण संचालन। (स्रोत: कॉमेक्स इनोवेशन)
एक ORUS3D प्रणाली का उपयोग करके Subsea सर्वेक्षण संचालन। (स्रोत: कॉमेक्स इनोवेशन)
सुंदर - औसत दर्जे का - चित्र
फ्लाई सर्वेक्षण में फोटोग्राममिति का उपयोग करके किया जा रहा है। समर 2018 में, कॉम्क्स इनोवेशन ने अपनी ORUS3D अंडरवाटर फोटोग्रामेट्री तकनीक का इस्तेमाल करते हुए दो नॉर्थ सी ऑफशोर इंस्पेक्शन प्रोजेक्ट्स को पूरा किया, जो पहले वेस्ट अफ्रीका, रेमंड रूथ, यूके और नॉर्थ सी एजेंट फॉर कॉम्क्स इनोवेशन ने कहा था। उत्तरी सागर के यूके और डेनिश क्षेत्रों में दोनों संचालन, उच्च सटीकता माप के लिए कहते हैं, एक ब्राउनफील्ड संशोधनों के समर्थन में है।
ORUS3D ऑप्टिकल सिस्टम उपायों को कम करता है और फिर उप-संरचना के उच्च-रिज़ॉल्यूशन 3 डी मॉडल बनाता है। प्रत्येक प्रणाली में त्रि-फोकल सेंसर का एक एकीकृत बीम शामिल है, जिसमें चार चौड़े बीम एलईडी फ्लैश इकाइयां, साथ ही एक डाटा अधिग्रहण और प्रसंस्करण इकाई है। यह अपनी सापेक्ष स्थिति को स्थानीय बनाने और माप के लिए उपयोग किए जा सकने वाले 3D बिंदु क्लाउड पुनर्निर्माण का निर्माण करने के लिए कैप्चर की गई छवियों के भीतर सुविधाओं के त्रिकोणासन का उपयोग करता है, ताकि साइट पर जब स्केलिंग के लिए ऑब्जेक्ट पर एक जड़त्वीय नेविगेशन सिस्टम या लक्ष्य प्लेसमेंट की आवश्यकता न हो।
एकीकृत इकाई संरचनाओं से 40 सेमी से अधिक दूरी से मुक्त-उड़ान डेटा अधिग्रहण के लिए एक आरओवी पर फिट बैठता है, हालांकि सबसे अच्छी दूरी वस्तु से 1-2 मीटर के बीच है। रूथ ने कहा कि यह सामान्य वीडियो सर्वेक्षण से अधिक लंबा नहीं है।
प्रारंभिक ऑनबोर्ड वास्तविक समय प्रसंस्करण स्थान और गुणवत्ता का आकलन करने के लिए किया जाता है, ऑनसाइट (समर्थन पोत पर) प्रसंस्करण से पहले, डेटा की आगे की गुणवत्ता की जांच करने और सेमी सटीकता के लिए एक प्रारंभिक स्केल किए गए 3 डी मॉडल बनाने के लिए। डेटा की अंतिम प्रसंस्करण, जिसे बिंदु क्लाउड डेटा के रूप में एकत्र किया जाता है, फिर साइट या ऑब्जेक्ट को 3 डी मॉडल में मिमी सटीकता के साथ फिर से संगठित करने के लिए किया जाता है।
 ORUS3D सर्वेक्षण के परिणाम (स्रोत: कॉमेक्स इनोवेशन)
ORUS3D सर्वेक्षण के परिणाम (स्रोत: कॉमेक्स इनोवेशन)
स्वचालित घटना
EIVA के सीनियर सर्वेयर मैथ्यू ब्रान्नन ने कहा कि EIVA मशीन लर्निंग और कंप्यूटर विज़न तकनीक के इस्तेमाल पर काम कर रहा है। मशीन लर्निंग का उपयोग करने का मतलब है कि पाइपलाइनों से हजारों छवियों के साथ एक प्रणाली को प्रशिक्षित करना। यह वही है जो EIVA कर रहा है, और यह फल फूल रहा है। कंपनी ने मौजूदा डेटा सेटों पर परीक्षण किया है जो पारंपरिक तरीके से आयोजित किए गए थे, इसलिए मानव निर्मितिंग के साथ स्वचालित परिणामों की तुलना करना संभव था। 2018 के अंत में, इसने आरओवी-आधारित संचालन के दौरान लाइव परीक्षण भी शुरू किया। ब्रैनन ने कहा कि प्रौद्योगिकी के लिए अंतिम उद्देश्य एक AUV सर्वेक्षण के दौरान स्वचालित ईवेंट मान्यता के लिए है, जिससे AUV को कुछ जगह मिल सकती है और फिर एक सतह पोत पर एक संदेश भेजा जा सकता है।
EIVA आगे भी पारंपरिक कैमरे ले रहा है, साथ ही मैप क्षेत्रों को करने के लिए एक साथ स्थान और मैपिंग (SLAM) और फोटोग्राममेट्री का उपयोग कर रहा है, जबकि यह मैपिंग करने वाले के सापेक्ष कैमरे की स्थिति का पता लगाने में सक्षम है। मौजूदा एसएलएएम सिस्टम लूप क्लोजर पर निर्भर करते हैं, और फोटोग्राममेट्री सॉल्यूशंस को बहुत अधिक छवि ओवरलैप और अच्छी दृश्यता की आवश्यकता होती है, और आमतौर पर वास्तविक समय नहीं होता है, ब्रैनन ने समझाया। कुछ लोग महंगे स्टीरियो कैमरों पर भी भरोसा करते हैं, जिन्हें कैलिब्रेशन की जरूरत होती है और स्पेस लेते हैं।
EIVA अपने सिस्टम को VSLAM या विज़ुअल SLAM कहता है। मक्खी पर एक विरल बिंदु बादल बनाकर, VSLAM अपने वातावरण में खुद को खोज सकता है (यानी वाहन जिस पर है) और स्वचालित रूप से उप-संरचना को ट्रैक और स्कैन करने के लिए इसे बनाने वाले मॉडल का उपयोग करता है। यह एक एकल कैमरे के साथ संभव है, ब्रैनन ने कहा, और अभी भी छवियों या वीडियो से निकाले गए चित्रों से, प्रत्येक छवि में अंक ट्रैक करके, और एक ट्रैक का अनुमान लगाते हुए, उन बिंदुओं का उपयोग करके, विरल बिंदु बादल बनाने के लिए, एक डिजिटल इलाके मॉडल का निर्माण। एक AUV अपनी मूल निरपेक्ष स्थिति को भी जानता होगा और फिर मार्ग के साथ वेपॉइंट्स (यानी लैंडस्केप) का उपयोग कर सकता है।
बिंदु बादल तब रंग और बनावट के साथ घने 3 डी बिंदु बादल और फिर एक जाल बनाने के लिए इस्तेमाल किया जा सकता है। EIVA ने 2017 से इस पर काम करने वाली एक टीम बनाई है और अब AUV पर सिस्टम का परीक्षण कर रही है। इस साल, यह विजुअल नेविगेशन के साथ लाइव प्रोजेक्ट चला रहा है, ब्रैनन ने कहा, और इसके बाद वह स्वायत्त निरीक्षण और हल्के हस्तक्षेप की सहायता करना चाहता है।
subSLAM
रोवको के पास एक स्वायत्त सतह वाहन (एएसवी) के साथ एक एयूवी को तैनात करने के लिए एक दृष्टिकोण है, जो सर्वेक्षण करने के लिए और अपनी सुबालाम लाइव 3 डी छवि और मानचित्रण तकनीक के साथ मैपिंग करता है। SubSLAM अन्य जड़त्वीय नेविगेशन या पोजिशनिंग सिस्टम का उपयोग किए बिना, एक ROV को अपने पर्यावरण के 3D मैप को मक्खी पर बनाने की अनुमति देता है। फर्म इसे लाइव 3 डी कंप्यूटर विजन कहती है।
 रोवको का लाइव सबसैलम कॉन्सेप्ट (स्रोत: रोवको)
रोवको का लाइव सबसैलम कॉन्सेप्ट (स्रोत: रोवको)
रोवको की सबस्लाम एक्स 1 स्मार्ट कैमरा तकनीक एक दोहरी कैमरा प्रणाली का उपयोग करती है जो इसे देखने का लाइव पॉइंट क्लाउड बनाती है। यह तब वाहन की स्थिति की गणना करने के लिए उपयोग किया जाता है जो इसे देख रहा है।
रोवको एक उप-अटलांटिक Mojave अवलोकन ROV पर SubSLAM का उपयोग कर रहा है, लेकिन इसे अन्य प्लेटफार्मों के साथ संगत कर रहा है, जो टिडबॉल ने कहा। फर्म ने अपनी पहली AUV, एक सबरीथ, इस साल साब सेय्ये से हासिल करने की योजना बनाई, इस साल 2020 में SubSLAM को एकीकृत किया और फिर 2021 में सिस्टम में कृत्रिम बुद्धिमत्ता (AI) का निर्माण किया। इसके बाद 2022 से एक ASV से सर्वेक्षण वितरित करना चाह रही है।
Tidball ने कहा कि सिस्टम सब-मेट्रोलॉजी के लिए उपयुक्त है और इसे ध्वनिक संचार का उपयोग करते हुए एक ताररहित वाहन के साथ इस्तेमाल किया जा सकता है, जो रेडियो / सेलुलर या उपग्रह नेटवर्क के साथ एक सतह संचार गेटवे से जुड़ा है और फिर क्लाउड पर जाता है, जहां इंजीनियर ब्राउज़र-आधारित माप उपकरण का उपयोग कर सकते हैं - लाइव 3 डी डेटा के साथ खिलाया जा रहा है। एआई के साथ, वाहन तब आकलन कर सकता है।
Rovco ने अगस्त 2018 में पूर्वोत्तर इंग्लैंड के Blyth में अपतटीय नवीकरणीय ऊर्जा गुलेल में अपने SubSLAM प्रणाली का परीक्षण किया। Tidball ने कहा कि कंपनी ने माप सटीकता का परीक्षण किया है जो सूखी गोदी में संरचनाओं पर स्थलीय सर्वेक्षण डेटा का उपयोग कर प्राप्त कर सकती है, जो तब बाढ़ में थी इसलिए SubSLAM बाढ़ सकता था। 1.2 मीटर दृश्यता में अपना काम करते हैं। पानी के नीचे के डेटा की तुलना एक लेजर स्कैन के खिलाफ की गई थी। टिडबॉल ने कहा कि 1.7 मिमी संरेखण त्रुटि के साथ ओपन-एयर सर्वेक्षण करने के लिए दो घंटे की तुलना में, सबसैलम ने 0.67 मिमी त्रुटि हासिल की।
Tidball ने कहा कि स्थिति की सटीकता के लिए सिस्टम लंबी बेसलाइन (LBL) सिस्टम की आवश्यकता को नकार सकता है, लेकिन कहा कि कैमरों के काम करने के लिए दृश्यता एक कारक थी। जबकि प्रौद्योगिकी अपने वातावरण के भीतर ROV या AUV को स्थिति में लाने में सक्षम है, अगर यह किसी अन्य साइट पर जा रहा है, और टीथरलेस था, तो जड़त्वीय नेविगेशन की आवश्यकता होगी।
वापस भविष्य में
स्कॉटलैंड स्थित ट्रिटोनिया साइंटिफिक के प्रबंध निदेशक डॉ। मार्टिन सियर ने कहा कि मक्खी पर पॉइंट क्लाउड बनाने के लिए इस्तेमाल की जाने वाली तकनीक का इस्तेमाल मौजूदा इमेज या वीडियो फुटेज से पॉइंट क्लाउड बनाने के लिए भी किया जा सकता है। एक उदाहरण के रूप में, ट्रिटोनिया ने एक उष्णकटिबंधीय स्थान में एक प्लेटफॉर्म जैकेट के शुद्ध पर्यावरणीय लाभ विश्लेषण के हिस्से के रूप में अपनी तकनीक का इस्तेमाल किया, जहां एक ऑपरेटर यह निर्धारित करना चाहता था कि ऑपरेशन की गणना और तटवर्ती निपटान के लिए एक जैकेट में अतिरिक्त वजन कितना बढ़ेगा। योजना। ट्रिटोनिया को मौजूदा आरओवी फुटेज का आकलन करने के लिए दिया गया था। यह मछली जीवन सर्वेक्षण के लिए लिया गया था, न कि जैकेट बायोफ्लिंग के लिए, इसलिए इसे 3 डी मॉडलिंग के लिए डिज़ाइन या इरादा नहीं किया गया था। दो एचडी कैमरे और एक मानक कैमरा आरओवी पर बाएँ, दाएँ और मध्य में लगाया गया था।
पानी में प्रकाश के कारण और अधिकांश फुटेज मछली पर निर्देशित किए जाने के कारण, इसका लगभग 95% उपयोग करने योग्य नहीं था। बाकी को रात में गोली मार दी गई थी, जिससे यह अधिक उपयुक्त हो गया, बिना किसी सतह के हस्तक्षेप और बेहतर कंट्रास्ट के साथ, पैर के पूरे खंड को मॉडल बनाने के लिए सक्षम किया गया। मॉडल से ज्ञात पैर की मात्रा को हटाकर, समुद्री विकास मात्रा युग्मन की गणना की जाती है।
उड़ान पर
कुछ लोगों के लिए, इस तकनीक की सभी वास्तविक क्षमता डेटा को लाइव करने और उस जानकारी का उपयोग करने में सक्षम होने के लिए सक्षम है (यद्यपि निगरानी में) स्वायत्त सिस्टम।
एक प्रतिक्रिया लूप है जो इन ऑपरेशनों को और अधिक शक्तिशाली बना देगा। "डेटा इकट्ठा करना [जिसे हम एकत्र करते हैं] स्वचालित रूप से तब होता है जब हमें मूल्य मिलता है," नाज़ली डेनिज़ सेविनि, यूआरओवी प्रोजेक्ट लीड, वनबसिया। "प्लस, [यह] पर्यवेक्षित स्वायत्त एल्गोरिदम और सुविधा का पता लगाने में एक प्रतिक्रिया पाश है," जैसे ब्रैनन ने चर्चा की।
बहुत कुछ हो रहा है। समर्थन वाहिकाओं की आवश्यकता के बिना पर्यवेक्षित स्वायत्तता, स्वायत्त दोष का पता लगाना, मानव रहित संचालन, लक्ष्य हैं। इस तरह के कानून के रूप में बाधाएं हैं, जो मानव रहित पोत प्रणालियों के क्षेत्र में उपलब्ध तकनीक के पीछे है। डेटा मानकों के साथ समस्याएँ हैं और अब बनाए जा रहे डेटा की मात्रा को कैसे संभालना है, और कम से कम इन तकनीकों को आज के वर्कफ़्लोज़ (या स्वयं वर्कफ़्लोज़ को एडैप करना) में नहीं बदलना है। यह तेज़ गति से चलने वाली जगह है, जिसमें भारी मात्रा में धुंधली सीमायें हैं (यदि चित्र नहीं हैं)।
डेटा सुनामी
नई इमेजिंग प्रौद्योगिकियां उप-दृश्य और स्वायत्तता के नए अवसर पैदा कर रही हैं। वे ऑपरेटरों के लिए एक "डेटा सुनामी" चुनौती भी पैदा कर रहे हैं। बीपी के पीटर कोलिंसन ने कहा, "सबसे बड़ी चिंताओं में से एक (वह) है जब आप एयूवी के बेड़े को बाहर भेजना शुरू करते हैं, तो हमारे पास डेटा की सुनामी आएगी। हम [सेंसर / सर्वेक्षण] प्लेटफार्मों पर ध्यान केंद्रित किया गया है, क्योंकि हम अभी भी भरोसा कर रहे हैं कि ये सिस्टम क्या हैं और वे क्या कर सकते हैं। डेटा टुकड़ा आ रहा है ... एक समय पर फैशन में उस डेटा के साथ काम कर रहा है। हम एक डिजिटल ट्विन कैसे बनाते हैं और पूर्वानुमान के माध्यम से प्राप्त करते हैं, समय श्रृंखला स्वचालित परिवर्तन का पता लगाते हैं? "
जबकि डेटा एकत्रित करना तेजी से विकसित होता है, भविष्य का ध्यान उन लोगों के लिए डेटा वितरण पर है, जैसे कि पाइपलाइन इंजीनियरों के लिए, एक प्रारूप में, जो सार्थक और उपयोगी है। आर्टिफिशियल इंटेलिजेंस (एआई) में मदद मिलेगी, कहा जाता है कि मैल्कम गॉल्ड, फुग्रो से, क्लाउड कंप्यूटिंग का उपयोग करके और स्वचालित रूप से विसंगतियों या दोषों का पता लगाता है। लेकिन सिस्टम विकसित करने में समय लगेगा, उन्होंने कहा। फुग्रो इस पर काम कर रहा है और पर्थ में परीक्षण कर रहा है, जिसने एआई के साथ मुद्दों को उठाने में मदद की है, जैसे कि शार्क से सिल्वर पाइपलाइन कोटिंग को अलग करना। भविष्य के कदमों में उस एआई में स्वायत्तता का निर्माण शामिल है। लेकिन, गॉलड ने सुझाव दिया कि नए मॉडलों को भी देखा जाना चाहिए। उन्होंने कहा कि पाइपलाइनों को सेंसर के साथ बनाया जा सकता है, जिससे सभी रखरखाव की भविष्यवाणी के साथ शुरुआत से इसे 'स्मार्ट' बनाया जा सकता है। "भविष्य में यह उस उपकरण के बारे में नहीं होगा जो आप उस डेटा को प्राप्त करने के लिए उपयोग करते हैं, लेकिन आप उस डेटा से क्या प्राप्त करते हैं।"
वास्तव में, भविष्य में, हम इस डेटा को भी नहीं देख पाएंगे, रोवेको के वरिष्ठ सर्वेक्षणकर्ता जो टिडबॉल ने सुझाव दिया। कृत्रिम बुद्धि, रोबोटिक्स, व्याख्या और निर्णय लेने का काम करेंगे। “मुझे नहीं लगता कि 10 वर्षों में हम अब और वीडियो देखेंगे। हमें बस नॉर्थ सी में रोबोट से ईमेल की गई रिपोर्ट मिलेगी जिसमें कहा गया है कि आपको XYZ को देखना होगा। ”
फास्ट पाइपलाइन निरीक्षण
पाइपलाइन सर्वेक्षण के लिए, बीपी तेजी से चीजों को करने पर ध्यान केंद्रित कर रहा है। 2017 में, बीपी ने दीपओन को अनुबंधित किया, "फास्ट आरओवी" (ऊपर चित्रित, नॉर्वे के किस्ट डिज़ाइन से सुपीरियर आरओवी) का उपयोग करते हुए, 478 किमी पाइपलाइन (नीचे नक्शा) का सर्वेक्षण करने के लिए, उत्तरी सागर में क्लेयर और मैग्नस सुविधाओं के बीच, सल्लूम वो टर्मिनल के लिए, तट पर। शेटलैंड, और ब्रेंट और निनियन सुविधाओं से मैग्नस तक, सभी चार दिनों में। इस सर्वेक्षण में लेजर, एचडी स्टिल कैमरा और फोर्स टेक्नोलॉजी फील्ड ग्रैडिएंट कैथोडिक प्रोटेक्शन सर्वे (CP) सिस्टम (FIGS) शामिल हैं, और 5.1kt / घंटा निरीक्षण समय, एक मानक ROV की तुलना में 6 गुना तेज और एक संशोधित ROV की तुलना में 5x तेज है। । इसमें साइड स्कैन और मल्टीबीम सर्वेक्षण डेटा भी शामिल थे। अंतिम परिणाम एक 3 डी दृश्य परत फ़ाइल, एक 2 डी जियॉर्फ़ेरेटेड मोज़ेक और इवेंट / विसंगति लिस्टिंग था।
 दीप ऑयन द्वारा बीपी के पाइपलाइन सर्वेक्षण के लिए एक कीस्ट डिज़ाइन सुपीरियर आरओवी को तैनात किया जा रहा है (स्रोत: बीपी)
दीप ऑयन द्वारा बीपी के पाइपलाइन सर्वेक्षण के लिए एक कीस्ट डिज़ाइन सुपीरियर आरओवी को तैनात किया जा रहा है (स्रोत: बीपी)
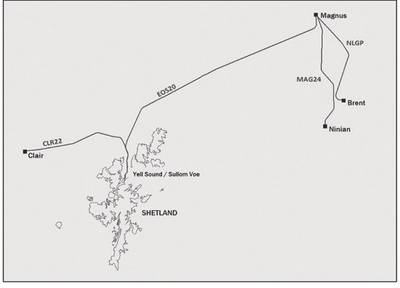 चार दिनों में पाइपलाइन प्रणाली का सर्वेक्षण किया गया (स्रोत: बीपी)
चार दिनों में पाइपलाइन प्रणाली का सर्वेक्षण किया गया (स्रोत: बीपी)
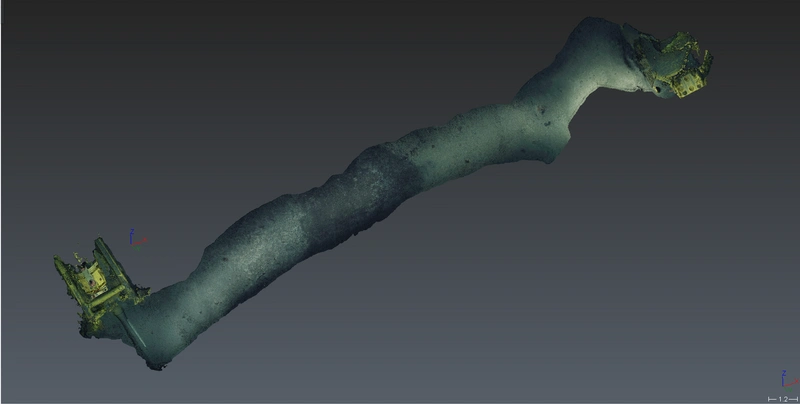
 सर्वेक्षण पर लगाई गई पाइपलाइन का एक भाग (स्रोत: बीपी)
सर्वेक्षण पर लगाई गई पाइपलाइन का एक भाग (स्रोत: बीपी)
स्ट्रेचिंग एक्टैक्टिक्स
Schlumberger company OneSubsea एक प्रोजेक्ट पर काम कर रही है जिसे uROV कहा जाता है। इसका लक्ष्य एक अनिर्धारित निवासी उप-वाहन है, जिसकी निगरानी स्वायत्तता है, जिसका अर्थ है कि किनारे से वाहन के साथ वीडियो के माध्यम से संवाद करने में सक्षम होना। लेकिन, 4 जी सेल्युलर नेटवर्क के उपलब्ध होने के बावजूद, एयर-वीडियो वीडियो संचार के माध्यम से ओपनिंग की जा रही है, पानी के वीडियो लिंक के माध्यम से इतना आसान नहीं है, नाज़ली डेनिज़ सेविनि, यूआरओवी प्रोजेक्ट लीड, वनबसिया, ने सोसाइटी ऑफ़ अंडरवाटर टेक्नोलॉजी (एसयूटी, इंटरनेशनल मरीन) को बताया अक्टूबर में कॉन्ट्रैक्टर्स एसोसिएशन (IMCA) और हाइड्रोग्राफिक सोसायटी (स्कॉटलैंड (THSiS)) संयुक्त संगोष्ठी।
OneSubsea के uROV प्रोग्राम में शाब्ले सीबरेट वाहन का उपयोग करने की योजना है, जो शल्लबर्गर प्रौद्योगिकियों के साथ घुड़सवार है। सेविन ने कहा कि यूआरओवी दृष्टि कहीं न कहीं एक एयूवी और मैन्युअल रूप से संचालित आरओवी के बीच है, जो अनैतिक और निगरानी वाली स्वायत्तता प्रदान करती है। इसमें एक "मानव पाश में" शामिल होगा, जबकि यह सतह संचार गेटवे से 3 किमी तक की दूरी पर काम करता है, जैसे। एक मानवरहित सतह। जब आस-पास की आधारभूत संरचना होती है, तो इसमें 200 m तक का जल-डेटा लिंक भी होगा।
यह 24/7 वाहनों को एक्सेस करने में सक्षम करेगा। लेकिन, इसका मतलब है कि सब-वे वाई-फाई, एडवांस्ड सेंसिंग, विजुअल सेंसिंग, एडवांस्ड कंट्रोल और ऑटोमैटिक एनालिटिक्स की जरूरत है। सेविनक ने कहा कि uroV मिशन की योजना के लिए EIVA Navisuite का उपयोग करेगा, और सब्बूथ के लिए एक स्वायत्त परत विकसित की जाएगी। लेकिन, यह वास्तविक समय की प्रतिक्रिया पर निर्भर करता है, जो संचार पर निर्भर करता है।
ब्राउनफील्ड संचालन के लिए, uROV ध्वनिक संचार को लक्षित कर रहा है, जिसका अर्थ है कि एक कम डेटा दर। OneSubsea, अपने मालिक Schlumberger के Boston बेस के माध्यम से, 100kpbs के माध्यम से कितना डेटा निचोड़ सकता है, इस पर काम कर रहा है। 2017 में, सेविनक ने कहा कि फर्म ने 1 किमी से अधिक 100kbps पर एक ध्वनिक चैनल के माध्यम से नाव-टू-नाव वीडियो हस्तांतरण हासिल किया। इसके बाद एक ऊर्ध्वाधर हस्तांतरण के साथ इसी तरह के परिणाम प्राप्त हुए। सेविनिस ने कहा कि यह वीडियो के लिए एक ऊपरी सीमा है, शेष बैंडविड्थ का उपयोग कमांड के लिए किया जा रहा है। 2018 के दौरान, इस क्षमता को uROV पर एकीकृत किया जा रहा था, जिसमें इस वर्ष 3 किमी के माध्यम से वीडियो डेटा स्थानांतरित करने की क्षमता विकसित करने और वर्ष के अंत तक वास्तविक तैनाती करने की योजना थी। अन्य किट को uROV पर एकीकृत किया जा रहा है जिसमें गहराई पर 3 डी से लेजर (प्रकाश का पता लगाना और लेना) लेजर तकनीक शामिल है।
ब्लूएनर्जीज और टोटलएनर्जीज ने लाइबेरिया के अपतटीय क्षेत्रों में अन्वेषण को गति दी।

हगिन बी प्लेटफार्म का ऊपरी भाग उत्तरी सागर विकास की ओर अग्रसर है।
-171989 "(क्रेडिट: एकर बीपी)")
वैटनफॉल ने जर्मनी के सबसे बड़े अपतटीय पवन ऊर्जा संयंत्र पर पहला मोनोपाइल स्थापित किया।
-171929 "नॉर्डलिच मोनोपाइल इंस्टालेशन (क्रेडिट: DEME)")
पेमेक्स के पूर्व प्रमुख पर दुर्व्यवहार के आरोप में जांच चल रही है; मेक्सिको के राष्ट्रपति शीनबाम ने कोई सुरक्षा प्रदान नहीं की है।
")
वार्ड ने टोयो कंस्ट्रक्शन को हाइब्रिड केबल लेयर की आपूर्ति की
-171805 "(क्रेडिट: वर्द)")
इक्विनोर ने जापान की अपतटीय पवन ऊर्जा परियोजना को रद्द किया

तैरता हुआ परमाणु ऊर्जा संयंत्र: अपतटीय ऊर्जा का एक नया क्षेत्र

मर्फी ने पश्चिमी अफ्रीका के तट से दूर तेल की खोज की

माको अपतटीय क्षेत्र ने पीटी पीएएल के साथ अनुबंध प्राप्त करके पहले गैस उत्पादन की दिशा में एक कदम बढ़ाया

-171635 "(क्रेडिट: कॉनरैड)")
वेलेउरा ने नोंग याओ में ड्रिलिंग कार्य पूरा किया, थाईलैंड की खाड़ी में उत्पादन में वृद्धि हुई

PRIO ने चौथा वाहू कुआँ चालू किया, उत्पादकों के लिए नियोजित रोलआउट पूरा किया
-171544 "(क्रेडिट: PRIO)")
ड्रिलिंग अभियान में प्रगति के साथ ही वैल्को ने गैबॉन के तट पर स्थित अपने कुएं से अच्छे परिणाम प्राप्त किए हैं।
-171461 "(क्रेडिट: वालको एनर्जी)")